LE CONSERVATEUR DE CAP
Le conservateur de cap est un instrument dont le rôle est sensiblement le même que le compas magnétique (être capable de garder le cap choisi), mais en plus précis. Il utilise la propriété de fixité d'un gyroscope à 3 degrés de liberté comme celui-ci:
Le volant gyroscopique tourne dans le cadre 1 (cercle1). Ce cadre peut pivoter dans le cadre 2 (cercle2). Le cadre 2 peut pivoter dans le cercle 3, qui lui est fixe, et correspond en fait, dans les "vrais" gyroscopes, au boitier.
Le principe est de pouvoir visualiser sur un cadran l'orientation (le cap) de l'avion dans un plan horizontal par rapport à la direction pointée par l'axe du gyroscope. Il faut donc que les mouvements RELATIFS du gyroscope par rapport à l'avion puissent être transmis à une aiguille indicatrice.
Ces mouvements relatifs dans le plan horizontal s'appliquent au cadre 2. Dans un conservateur de cap (gyrocompas), ce cadre 2 est donc lié à l'aiguille indicatrice via un système d'engrenage, le cadre 3 étant le boitier lui-même.
Le cadre2 entraine donc la roue dentée4 qui tourne sur l'axe5, et peut entrainer à son tour l'aiguille via un engrenage.
Le dessin ci-dessus représente un gyroscope très
simplifié. Dans la réalité les cadres
sont
beaucoup plus épais, car les contraintes sont parfois
très importantes, et le volant d'inertie est plus large,
surtout
lorsqu'il constitue le rotor d'un moteur électrique.
Imaginons que je décide de construire un gyrocompas à entrainement électrique. Je choisi, comme volant d'inertie, un rotor de moteur électrique (1). Dans un gyroscope, le volant d'inertie est placé dans un cadre qui peut avoir la forme d'un cercle (2), ou d'un rectangle (3), peu importe. Le rôle de ce cadre est de servir de support au volant d'inertie/rotor de moteur électrique, tout en lui permettant de tourner librement
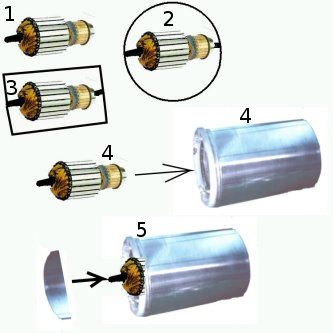
Ce rôle de premier cadre peut donc très bien être tenu par le corps (la carcasse ) du moteur électrique. Imaginez que le cadre rectangulaire (3) soit en fait la carcasse du moteur vue en transparence. Je place donc le rotor dans le corps du moteur (4), et je ferme (5), reconstituant ainsi le moteur électrique. Maintenant je peut donc assimiler mon moteur électrique à un volant de gyroscope dans un premier cadre.
Le deuxième cadre doit servir de support au premier cadre, tout en lui permettant de pivoter librement; Il n'est pas nécessaire qu'il forme un cercle, ou un rectangle fermé, une sorte de fourche avec pivots peut très bien faire l'affaire, comme ceci:
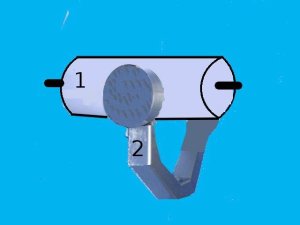
On a notre moteur electrique (1) qui constitue à la fois le
volant d'inertie ET
le premier cadre, et la fourche (2) sur laquelle le moteur
électrique peut pivoter librement. Cette fourche, c'est le
deuxième cadre.
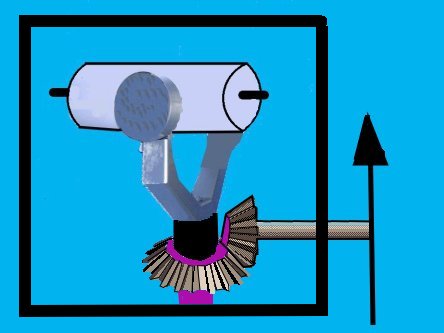
Le troisième cadre, ce sera le boitier de l'instrument. Le
deuxième cadre (la fourche) doit pivoter sur le
troisième (le boitier), tout en transmettant ses
éventuels mouvements RELATIFS
à l'aiguille indicatrice via un système
d'engrenage. Ca donnera quelque chose comme ça:
Le moteur électrique d'un vrai gyrocompas n'a pas les même proportions que celui du dessin ci dessus, en effet l'efficacité d'un gyroscope est directement proportionnelle à l'inertie du volant qui elle même dépend directement de sa masse, de sa vitesse de rotation ET de son diamètre (plus le diamètre est grand, plus la vitesse tangentielle est grande).
Pour mettre l'accent sur le diamètre, le moteur d'un gyroscope électrique sera en fait moins allongé, et plus "gros", comme ceci:
Quoiqu'il en soit, et même en corrigeant les proportions du moteur, il s'agit toujours d'un schéma simplifié, dans lequel il manque, par exemple, un système de reglage avec bouton permettant de "caler" l'instrument, c'est à dire de choisir la direction dans laquelle "pointera" le gyroscope du gyrocompas.
Pour bien fonctionner, l'axe du volant du gyroscope doit toujours être à l'horizontale; dans le cas d'un long voyage, la rotondité de la Terre aura une influence néfaste à ce niveau.
Ces avions volent tous les deux à l'horizontale, mais pour un gyroscope, les deux directions sont perpendiculaire. C'est pour cette raison que les gyrocompas sont équipé d'un système de mise à l'horizontale automatique.
Attention, une simple fixation entravant les mouvements dans un plan vertical n'est pas recommandée, le phénomène de précession produirait alors un mouvement dans le plan horizontal.
Au contraire, les
systèmes de mise à l'horizontale cherchent
plutôt à utiliser cette
propriété de précession pour "recaler"
le gyroscope dans la "nouvelle" horizontalité.
Si nous prenons l'exemple d'un gyrocompas à entrainement
pneumatique cette fois, le dispositif de mise à l'horizontale du
gyroscope se présente comme ceci:
L'air du système d'entrainement pneumatique souffle sur une
pièce en biseau solidaire
du deuxième cadre.
Tant que
l'axe du gyroscope est horizontal, le souffle est parfaitement
centré, et les forces de chaque côté du biseau
s'équilibrent; mais dès que l'axe s'écarte, les
deux versants du biseau ne sont plus soumis au même flux.
Il apparait alors, dans ce deuxième cadre, une force de
pivotement à laquelle le volant du gyroscope réagira par
une précession qui le réalignera correctement.
On peut imaginer plusieurs solutions pour réaligner un gyroscope à entrainement électrique. Un rhéostat entrainé par les mouvements, dans le plan vertical, du premier cadre pour "détecter" l'importance de l'écart, et un électro-aimant pour effectuer une petite poussée sur le deuxième cadre, par exemple. Mais quoiqu'il en soit, ce sera toujours en produisant une précession qu'il sera réaligné.
Le gyrolaser:
Il s'agit d'un conservateur de cap utilisant un système de
faisceaux lasers en lieu et place du gyroscope.
Avantage: pas de
pièces en mouvement, pas de mécanisme, pas d'usure, pas
d'obligation de bloquer les gyros lors de manoeuvres rudes pour
éviter la torsion des cadres.
Il ressemble à quelque chose comme ça:
Comment ça marche?
Tant que l'avion garde le même cap, il ne se passe rien de
spécial, les 2 faisceaux atteignent le récepteur en
même temps, et de la même manière, car les deux
trajets sont égaux.
Imaginons maintenant que l'avion se mette à tourner vers la droite, par exemple. En tournant à droite, l'avion entraine l'instrument dans une rotation à droite. J'ai dessiné ici l'allongement du chemin parcouru alors par le faisceau de gauche par rapport à celui de droite, qui lui, a diminué.
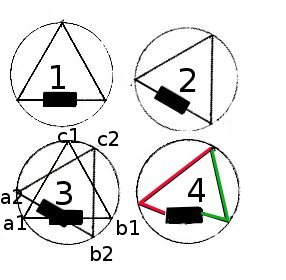
En passant de la position 1 à la position 2, le parcours n'est plus a1-c1, et b1-c1, mais a1-c2, et b1- c2 comme montré en 3. Le dessin 4 met bien en évidence la différence entre les nouveaux trajets.
TOUTEFOIS, ATTENTION DE ATTENTION DE ATTENTION, ces dessins n'ont pour but que de montrer le plus visiblement possible que la rotation du système à entrainé une modification de la longueur des trajets. Il est hors de question de penser qu'ils représentent la réalité*.
En effet, la différence entre la vitesse de la lumière, et la vitesse de déplacement du triangle est tellement ééénoooorme que le triangle n'a eu le temps que de bouger d'une manière infimissime, et même encore moins, moins, moins sur le temps de trajet du faisceau laser.
Bref, les écarts tels que dessinés sont très grandement exagérés.
Alors, pour des écarts si faibles, comment faire la différence? comment détecter un déplacement aussi infime?
Grâce au déphasage, comme ceci:
Ces deux ondes sont strictement les mêmes. Même amplitude (entre a et - a), même longueur d'onde (distance nécessaire à une double alternance complète, ou distance séparant deux crêtes, indiquée par les lignes vertes).
Leur seule différence est d'être en déphasage, c'est à dire leurs maximums (bosses), ou leurs minimums (creux) sont en décalage.
L'onde n°2 a moins de
distance à parcourir, et c'est pourquoi elle arrive en
déphasage par rapport à la première.
La
première arrive au moment où elle passe par 0 (axe des
x), la deuxième arrive en étant presque à un
sommet. C'est ce déphasage qui est détecté par le
récepteur, puis interprété en terme de distance et
donc de mouvement de l'avion.
(*) Petite remarque supplémentaire: L'explication ici donnée peut faire penser que la relativité est ignorée. Il n'en est rien, mais dans ce cas précis ci, rien ne distingue suffisament l'approche classique et relativiste. Merci Sagnac....